Lista jego zadań jest zbieżna z zadaniami technika na miejscu zdarzenia. Ma ślad znaleźć, udokumentować, wstępnie zanalizować, zabezpieczyć i przetransportować w bezpieczne miejsce.
– Zasada jest prosta – jeśli będzie podejrzenie, że na miejscu zdarzenia występuje jakiekolwiek skażenie, wyślemy robota – opowiada Ewa Jędrych, specjalista Zakładu Broni i Mechanoskopii CLKP.
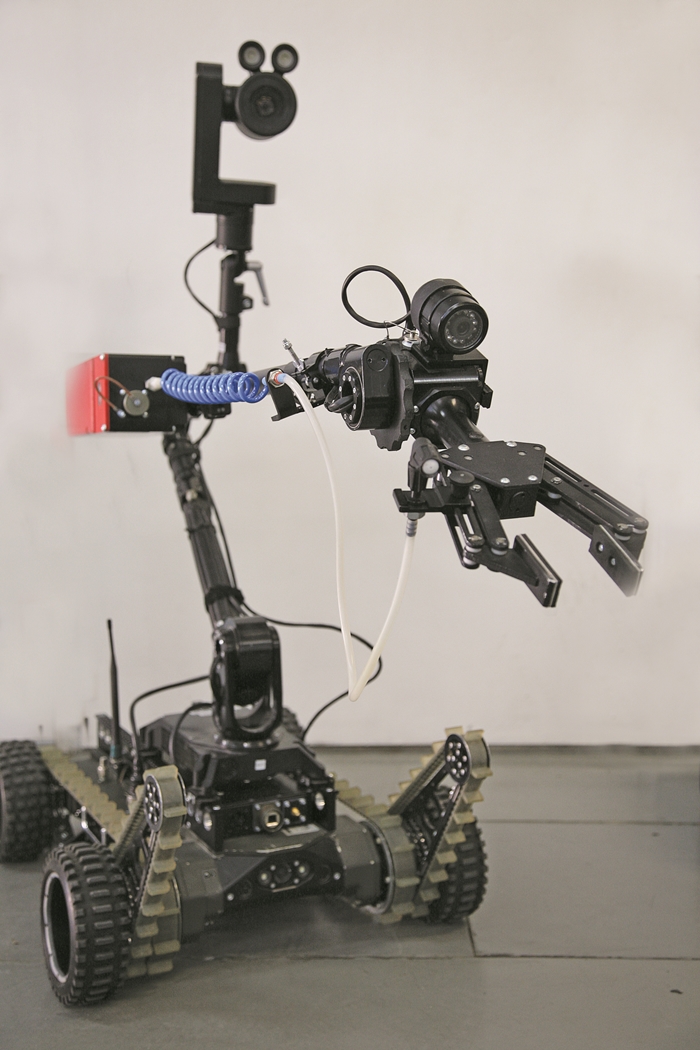
KONSTRUKCJA
Konstrukcja bazuje na robocie PIAP-Gryf, opracowanym przez Przemysłowy Instytut Automatyki i Pomiarów. Podstawą systemu jest bezzałogowa, kołowo-gąsienicowa platforma mobilna, dzięki której robot dostaje się do zagrożonego miejsca zdarzenia i porusza w jego obrębie. Platforma dźwiga na sobie wyposażenie, oprzyrządowanie i czujniki wykrywające zagrożenia.
Kieruje nim za pomocą konsoli operator, ale ponieważ platforma jest bezprzewodowa, może dojść do utraty bądź zakłócenia łączności.
– W takim przypadku robot powróci sam po własnych śladach – dodaje asp. Krzysztof Biskup z Zakładu Broni i Mechanoskopii CLKP.
To ważna funkcjonalność zmniejszająca ryzyko przypadkowego zniszczenia śladów. Opracowany i wykonany moduł autonomii rejestruje trasę przejazdu robota, a następnie kieruje jego samodzielnym powrotem. Punkt początku rejestrowania trasy przejazdu ustanawiany jest przez operatora. Decyzja o rozpoczęciu nawigacji autonomicznej jest podejmowana przez komputer sterujący robotem, gdy nie ma on połączenia z konsolą przez czas dłuższy niż 5 minut. Decyzję o powrocie autonomicznym może podjąć także operator w sytuacji, gdy uzna, że sterując samodzielnie robotem, może zniszczyć ominięte wcześniej ślady kryminalistyczne.
Połączone gąsienicami koła zwiększają mobilność robota przy pokonywaniu przeszkód. Kąty wychylenia platformy, zarówno na osi zbieżnej z kierunkiem jazdy, jak i prostopadłej, są na tyle duże, że praktycznie nie powinna się przewrócić.
– Możliwości robota są bardzo duże, w wielu kwestiach znacznie przekraczające zdolności percepcyjne człowieka, jednak to operator kieruje robotem i to on podejmuje wszystkie decyzje – przypomina Ewa Jędrych, specjalista Zakładu Broni i Mechanoskopii CLKP.
NARZĘDZIA
Oczami urządzenia są cztery kamery. Dwie wbudowano w podwozie, jedna umieszczona jest na końcu chwytaka, czwarta, obrotowa wraz z oświetleniem na specjalnie dla niej przeznaczonym ramieniu manipulatora.
Urządzenie wyposażone jest również w aparat sferyczny Spheron VR wykonujący zdjęcia o kącie rejestracji 180° w pionie i 360° w poziomie. Każde zdjęcie rejestrowane jest w pełnej rozpiętości tonalnej, a więc uwzględniając odcienie od najjaśniejszego do najciemniejszego punktu fotografowanej sceny.
Dzięki zdjęciom wykonanym aparatem sferycznym obraz miejsca zdarzenia i jego okolic jest dostępny dla organu procesowego wielokrotnie i w dowolnym czasie.
– Jakość zdjęć umożliwia potem dokonywanie na ich podstawie precyzyjnych pomiarów – dodaje Marcin Kloch, specjalista Zakładu Badań Dokumentów i Technik Audiowizualnych CLKP.
Ręką jest manipulator z siedmioma stopniami swobody, co pozwala manewrować nim w dowolnym kierunku. Do uchwytu ramienia można zamontować wszystkie dostępne urządzenia.
CZUJNIKI
System sensoryczny platformy podzielono na cztery moduły: sensory chemiczne i radiologiczne, oświetlacz wielobarwny, radiometr spektrometryczny i magnetometr magneto-rezystancyjny.
Przygotowany przez Politechnikę Warszawską moduł chemiczno-radiologiczny wykrywa, identyfikuje oraz określa stężenia substancji stwarzających potencjalne zagrożenie wybuchowe lub toksykologiczne.
Do wykrywania i identyfikacji substancji promieniotwórczych służy moduł radiometru spektrometrycznego, w którym zastosowano najnowszej klasy fotodiody PIN do detekcji promieniowania i analizy jego źródła.
Magnetometr będzie wykorzystywany jako źródło informacji o natężeniu lokalnego pola magnetycznego. Sensory magnetyczne umożliwiają badanie pola magnetycznego generowanego przez metalowe przedmioty lub tylko zawierające metalowe elementy. Dzięki niemu możliwa będzie także ich lokalizacja.
Spektrometr ramanowski FirstDefender RMX umożliwia identyfikację ciekłych i stałych chemikaliów przemysłowych, składników broni chemicznej, materiałów wybuchowych, narkotyków i ich prekursorów, a także pospolitych substancji dostępnych w handlu detalicznym.
– Metoda pomiaru jest bezkontaktowa i nie wymaga części zużywalnych. Uruchomienie pomiaru, konfiguracja jego parametrów i bieżący odczyt wyników, tak jak w przypadku wszystkich czujników, dostępne są na konsoli operatora – precyzuje Ewa Jędrych.
Zintegrowany z kamerą oświetlacz wielobarwny oprócz tego, że oświetli miejsce zdarzenia, może to zrobić także w ultrafiolecie (UV) i podczerwieni (IR), co umożliwi i poprawi widoczność substancji luminescencyjnych i biologicznych.
ZABEZPIECZANIE ŚLADÓW
Do ramienia robota zamontować można różne końcówki. Jedną z podstawowych jest przygotowana przez firmę Hagmed tzw. wymazówka, służąca do pobierania z podłoża i zabezpieczania śladów biologicznych lub chemicznych. Po pobraniu śladu „wymazówka” trafia do specjalnie zaprojektowanej próbówki chroniącej ją przed zanieczyszczeniem w trakcie transportu. Podobnie działa próbnik przeznaczony do pobierania i zabezpieczania materiałów sypkich.
Zaadaptowano także wiertarkę, aby pobrać próbkę z wiórów, i przecinarkę, jeśli konieczne będzie pobranie jako próbki np. fragmentu blachy. W zestawie przygotowano komplet wierteł i ostrzy.
Na platformie możliwe jest również zamontowanie zasobnika do przewożenia pojemników otwartych, np. szklanki lub słoika.
– Pojemnik w czasie transportu unieruchamiany jest przez docisk dna od wewnątrz naczynia, co zabezpiecza przed starciem śladów daktyloskopijnych mogących znajdować się na jego powierzchni – wyjaśnia Krzysztof Biskup.
Jeśli sytuacja wymaga zabezpieczenia ciekłych chemikaliów, służy temu pobierak mieszczący 150 ml cieczy, wykonany z materiałów odpornych na substancje agresywne.
Urządzenie może także pobierać próbki lotne zarówno z atmosfery w pomieszczeniu, jak i z oparów nad cieczą. Pobierak SPME przechwytuje cząsteczki gazu, na zasadzie swobodnej dyfuzji, na igłę z włókna.
Jednym z elementów opisywania miejsca zdarzenia jest numerowanie śladów. Aby było to możliwe, na platformie zamontowany jest zasobnik mieszczący 19 ponumerowanych tabliczek.
Jeśli zdaniem operatora konieczne będzie wywiezienie z miejsca zdarzenia przedmiotu, np. butelki lub pistoletu, można na platformie zamontować zasobnik pozwalający
zabezpieczyć je w całości. Zasobniki są różnej wielkości i są szczelnie zamykane po powrocie do operatora. Największy pojemnik ma wymiary 280 x 280 x 120 cm (bez pokrywy) lub 280 x 280 x 160 cm (z pokrywą).
Możliwe jest także odwzorowanie powierzchni, np. śladu buta, przez nałożenie warstwy silikonu. Kontrola ilości silikonu odbywa się z poziomu panelu sterowania operatora.
Nowatorskim rozwiązaniem jest dystrybutor luminolu z dyszą na końcu chwytaka. Rozpylony luminol ujawnia ślady biologiczne w oparciu o reakcję luminescencyjną. Pojemność pojemnika z luminolem to 0,5 l.
Każdy ślad musi być oczywiście dokumentowany fotograficznie. Służy temu zamontowany do ramienia aparat fotograficzny. Migawkę zwalnia operator.
Źródłem energii są wymienne akumulatory, osobne dla platformy i osobne dla montowanego na niej sprzętu. Te drugie można ładować bezprzewodowo, co znacznie wydłuża czas pracy bez konieczności ściągania platformy z miejsca zdarzenia. Na jednym ładowaniu platforma jest w stanie pracować przez 2 godziny.
KLAUDIUSZ KRYCZKA
zdj. Andrzej Mitura i CLKP
Dyrektor Centralnego Laboratorium Kryminalistycznego Policji insp. dr Waldemar Krawczyk:
– To wizytówka postępu technologicznego, jaki odbywa się w polskiej kryminalistyce. Oczywiście większość rozwiązań wykorzystanych na platformie już jest stosowanych, jednak do tej chwili nie mogły być wykorzystywane zdalnie. Z punktu widzenia bezpieczeństwa techników to ogromny postęp. Oczywiście sytuacje, do których robot został zaprojektowany, np. skażenia biologiczne czy radiologiczne, zdarzają się rzadko, ale już skażenia chemiczne, np. chemikaliami w fabrykach narkotyków, których rocznie likwidujemy około 15, są zagrożeniem realnym. W tej chwili trwają prace nad przekazaniem praw do konstrukcji z Ministerstwa Obrony Narodowej do Ministerstwa Spraw Wewnętrznych. Myślę, że to kwestia najbliższych miesięcy. Potem, jedyna na razie gotowa platforma, rozpocznie służbę w Policji. Oczywiście byłoby idealnie, gdyby każdy garnizon mógł mieć swojego robota, ale na początek wystarczy, jeśli będzie ich 3–4.
Projekt został realizowany przez Centralne Laboratorium Kryminalistyczne Policji, Politechnikę Warszawską, Przemysłowy Instytut Automatyki i Pomiarów oraz firmy Stanimex i Hagmed. Prace rozpoczęły się w 2011 r., a zakończyły w lutym 2015 roku Finansowany był ze środków Narodowego Centrum Badań i Rozwoju.